声源定位技术原理和应用
什么是声源定位技术?
噪声和异常噪声在日常生活和工业生产中很常见,例如汽车期间的异常尖叫。为了解决这些噪音问题,我们需要确定噪声并将噪声从噪声引起的噪声由哪些设备或组件引起的位置。这是声源定位的问题。声源定位技术是一项确定声音在空间源中的位置的技术。声源定位技术可用于噪声源定位或其他声音定位,例如确定会议室中的扬声器位置。
在日常生活中,我们的耳朵会听到各种声音并识别定位,即“聆听位置”。当某些人发出声音时,人们可以很容易地知道大喊大叫的人。人耳可以轻松判断从汽车上驾驶的汽车的方向,甚至知道汽车有多远。人的耳朵还可以挑战一些困难的声音定位要求,例如盲人也可以踢足球。
但是,人耳的原始声音定位功能仅是解决生命和生存问题,定位精度非常有限。在现代工业化社会的生产和生活中,许多场景的声音源定位不再满足要求。例如,当道路上有密集的排列时,人的耳朵无法区分哪辆车是由号角开制的。人耳无法确定压缩机的尖叫是否是由齿轮散发或发射的;没有办法去人耳;人耳没有办法。哪些以100米高风力涡轮机区分的叶片具有更大的风噪声。
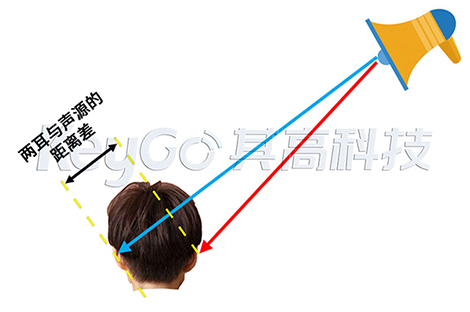
为了改善声音源定位的定位,需要技术手段。常见的声源定位解决方案包括麦克风阵列和声音强探头。大概这两种声音定位解决方案和技术是人耳声定位机制的扩展,并且是仿生技术。麦克风阵列模仿了人类的两个耳朵。麦克风阵列使用数千到数千台麦克风,这相当于许多人长大的耳朵,因此它达到了耳朵的定位精度。可以简单地考虑强烈的探针模仿单个耳朵以聆听声源,并用手包裹耳膜,使耳朵被远处的声音打扰。将头移动在听力对象附近以确定声源位置。
简而言之,噪声识别和声音源定位技术是技术进步的全面应用,例如传感器,数据收集和信号处理。与人耳相比,模拟耳朵的定位机制可以达到更高的定位精度,更广泛的频率范围,更多的频率范围,更频繁的范围,更频繁的范围。大声音强度范围。
声音源定位技术的应用
声音,尤其是噪音和异常噪声,通常是指无限制的产品,故障,环境紧急情况或意外。为了解决这些质量,故障,事故和其他问题,需要噪声检测来通过噪声源定位技术来确定这些问题的位置。声源定位在许多行业中都有应用要求,例如汽车,家用电器,航空航天等。
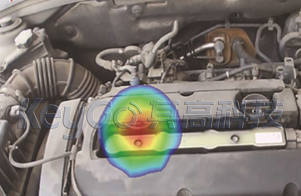
汽车的异常噪声/噪声源定位
以汽车行业为例,汽车研发过程是逐渐适应和优化的过程。当第一个原型在道路上测试时,很可能会发出各种异常声音。 ,仪表板可能会产生共振噪声(嘎嘎声,挤压);内部和密封不好,发动机的噪音或轮胎噪声将泄漏到汽车中,从而导致汽车中的NVH(噪声,振动和苛刻)索引不得。与研发设计目标一致;底盘或电源系统,以及诸如摩擦和嗡嗡声之类的异常声音以及敲门过程。
汽车中的空间相对较小,噪声源位置可能朝着各个方向。依靠人的耳朵和经验不再准确地位于噪声源位置。噪声源位置。
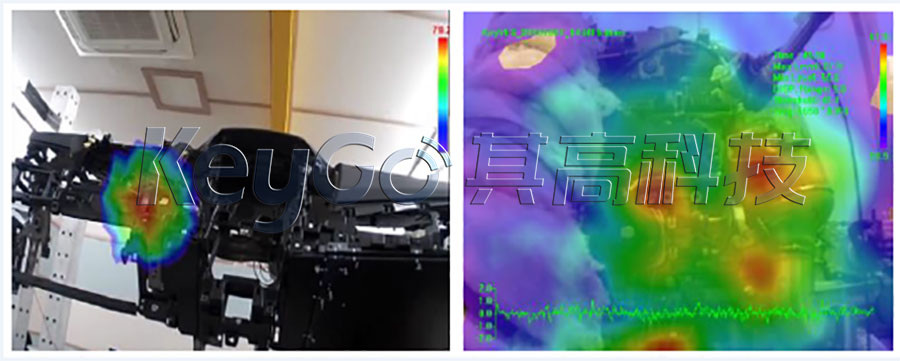
例如,以下视频是Roco声学摄像头异常定位到汽车导管的声音视频。
与汽车行业类似,有许多行业需要由声学摄像机(例如家用电器,航空航天,消费电子,重型设备等)使用kaiyun全站app登录入口,只要产品中有能量或声音零件,例如风扇,轴承,扬声器等,声音源定位技术的应用非常重要。在此类产品的研究和开发过程中,使用声相机可以大大提高工作效率并迅速找到噪声源或异常位置,从而帮助工程师快速解决问题并针对性。
声音源定位技术应用的另一个分支是语音或其他声音方向的定位。例如,安全机器人,服务机器人和远程会议系统需要在工作过程中响应声音。当安全机器人听到一定方向的声音相对较大时,相机需要与视频方向保持一致。服务机器人需要确定说话者的位置,以便与服务对象交谈;为了控制摄像机以对扬声器进行密切操作,将其近距离视频传输到远程端,以获得更好的实时广播效果。

声源定位技术用于机器人行业
军事行业领域也有许多应用。例如,根据子弹飞行的声音,可以找到狙击姿势;根据炮弹的爆炸,您可以确定炮弹的坐标;使用了潜艇和军舰,目标位置和轨迹根据水中的敌方船只或武器的声音定位。
声源定位算法原理
声源定位技术可以分为两类,即声音阵列的声音位置(也称为扬声器阵列或麦克风阵列)和声场测试。
麦克风阵列由数千至数千个麦克风组成,按照某些规则安排。多个麦克风同步收集声音信号,并使用多个麦克风之间的信号相差来获取噪声源信号的位置。声音强探头由两个扬声器的面对面 - 面 - 脸部,它们可以测量声音,声波振动速度和空间的每个点的方向,扫描和测试在受试者表面或包装的表面附近,可以得到测得的物体附近的声场。分布,以掌握噪声源的位置和分布。
声音阵列和多声音强探头声音源定位系统
麦克风阵列通常用于相对较远的声音源定位,并且噪声源的大小小于距麦克风阵列的距离。声音强探针通常在复杂的目标和环境中的声源定位中使用。例如,研讨会中压缩机的噪声水平和雷声非常大,噪声的来源也很复杂。它适用于使用声音探针进行声源定位。当然,麦克风阵列也可以用于更紧密的声源定位应用程序。
麦克风阵列的声音定位算法主要包括以下类别:
1)到达时间(TDOA,到达的时间不同))
TDOA原理很简单,麦克风的量很小,计算量很小,并且很容易实现。 TDOA的主要核心是计算声源到达每个麦克风之间的时差,这要求系统的采样速率足够高。另外,该方法通常通过互操作性或扩展算法来计算时间差,这可能不适合定位周期性信号。
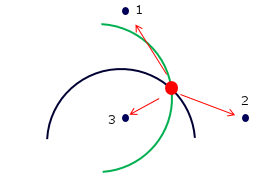
TDOA原则
例如,上图中的红点是噪声源位置,黑点是麦克风的测量位置。根据小麦1和小麦3之间的时差,我们可以绘制黑色双曲线。 (双重曲线的性质之一:从点到两个焦点上对双曲线的距离之间的差异是常数)。同样,我们可以根据MAI 3和MAI 2之间的时间差来绘制绿色曲线。这两条曲线的相交是噪声源的位置。
2)梁的形成(光束形成)
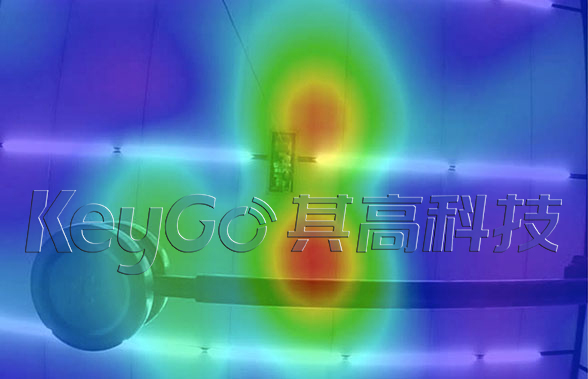
光束形成方法由阵列中的每个传感器收集的信号过滤,并在加权叠加层后形成梁。扫描整个接收空间,并可视化平面的声压分布。盲梁形成方法很强,无需优先知识,并且使用简单而直观的,因此此类设备也被图像称为声学摄像头。光束形成也被转化为某些文档中的“光束形成”。
基于光束的声学摄像头用于各种噪声测试
3)高级Hociffei(全息图)
麦克风阵列声音全息算法可以重建测得的物体周围的整个声场,从而可以获得任何表面上的声压分布。假设周围的对象符合某个声场数学模型,则将麦克风数组收集到声场中的多点声压值,以便在数学模型中求解未知参数并获取整个声场信息。声学全息算法和梁形成算法的比较。优势在于,低频音源也可以保持良好的分辨率。
最早的商业声学全息算法是STSF(声场的空间转换)。通过2D FFT的算法计算麦克风阵列在麦克风周围均匀分布在麦克风周围,以便在麦克风阵列的每个平面的每个平面上获得平行的平行。声压分布。 STSF需要麦克风阵列覆盖测量的对象。实际操作通常要求麦克风阵列的面积至少是测量面积的4倍。这很难满足实际使用中的要求,因此STSF的直接应用非常小。 SONAH(在现场全息图中优化的统计数据)是STSF算法的进一步改进,并且不需要麦克风阵列和麦克风的大小。 SONAH更适合实际应用,可以使用与波束成形算法相同的麦克风阵列。
目前,声学相机的主流算法使用光束形成光束成形算法。除了支撑光束形成光束形成算法外,其弹性摄像头还支持Sonah算法。对于低频声源,也可以执行准确的定位。此外kaiyun全站登录网页入口,其刚性摄像头还支持多种波束成型算法的改进算法开元棋官方正版下载,例如Damas(用于映射声源的Deconvolut方法)。
声源定位设备和产品
声音源定位设备和产品,市场具有强烈的声波探针,声波质量,扫描探头和声音阵列。

声源定位产品分类
声音强的调查具有悠久的历史,其原则是在1930年代提出的。国内外的总供应商都有成熟的声音追求产品。更常见的产品是双扬声器,由两个扬声器面对面的面孔组成。还有三个维度的声音探针由四个扬声器组成。用于相同声学探针的麦克风需要配对,即频率响应与麦克风之间的频率响应之间的差异小于一定的误差范围。
声音强探头有两个主要用途:声源定位和声音功率测量。当使用声源定位时,网格点通常会在测试目标附近的平面上分配,并且每个网格点上的声音都很强。它的高信号测量和控制软件支持声音强度测量。可以将其导入图片。测量每个网格点的声音强度与图片叠加在一起,这对于相对较小且直观的定位噪声源很方便。袋子的声音强度的声音能够获得声音功率,因此您可以通过测量目标的目标来测量包装表面上的声音,然后在计算后可以获得声音。声音测量不受环境噪声的影响,因此可以在普通环境中进行测试,而无需在闷闷不乐的房间内进行测试。它的高信号尺寸测量和控制软件还支持声音功率测量,包括声音强度,十点声压或二十点声音压力方法。它的高技术提供了完整的声音电源测量解决方案,包括声音范围,扬声器,数据收集系统,软件等。
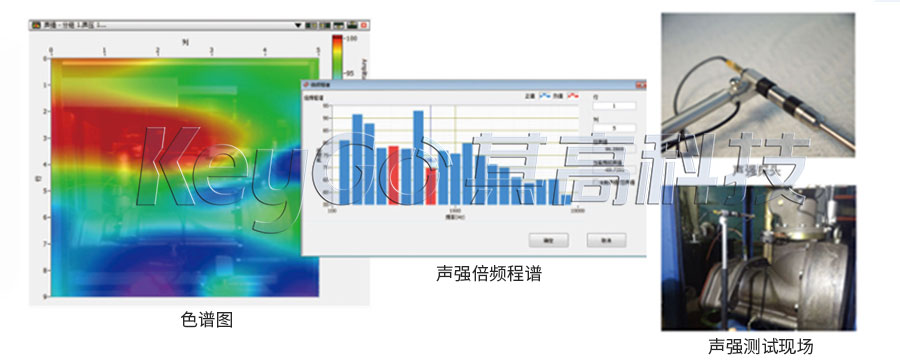
它的高信号尺寸测量和控制软件支持声音强烈的测量
声波质量振动速度传感器是由两条铂金属丝组成的特殊传感器。当声波穿过铂金属丝时,温度差铂金属丝之间的电阻差与声波振动速度成正比。因此,这种类型的传感器是可能的。测量声波的振动速度。声波质量振动速度扫描探针通常与麦克风集成在一起,该探针可以同时测量声压和质量点速度,并且每个测量点都会输出一个向量。通过声音压力和质量点的速度,声音很强,因此声波质量振动速度扫描探针也可以获得声音强度分布。
在过去的二十年中,在过去的二十年中,声音阵列产品迅速发展,并且已成为声音源定位的常用仪器。
声音阵列由某些规则由数千至数千个说话者组成。所有说话者都同步收集声音信号,并使用算法来计算声学参数的空间分布值,例如兴趣区域中的声压。
由于声音唤醒使用大量扬声器,因此扬声器通常以流行的方式称为麦克风,因此声音阵列更常见地称为麦克风阵列。
麦克风阵列的分类可以以不同的角度进行。
1)根据所使用的传感器类型,可以将其分为MEMS麦克风阵列和工业电容麦克风阵列。
MEMS麦克风很小,高度集成且相位良好。它通常用于小麦克风阵列。可以将几到数百个MEMS麦克风集成在PCB电路板上以实现麦克风阵列。手机上的智能扬声器,笔记本电脑和微型散发器是使用MEMS麦克风建造的。用于工业用途的大多数便携式声学相机也使用MEMS麦克风。
MEMS麦克风
工业电容扬声器通常用于构建一个中和大型麦克风阵列,该阵列用于具有较高性能要求的场合,尤其是在衡量绝对价值的情况下。此外,电容麦克风可以实现高灵敏度,适合某些特殊的测试场景。结合数据采集系统,技术在各个方面都相对成熟,适用于构建具有相对较大物理尺寸的麦克风阵列。当然,MEMS麦克风技术也在不断更新。电容麦克风的优势将变得越来越小。许多应用程序场景可以用MEMS麦克风代替。
2)根据说话者之间的空间维度关系,麦克风阵列可以分为一个维数阵列,两个维数阵列和三个维数阵列。
一个维数阵列,也就是说,所有扬声器都可以用来确定麦克风阵列中的声音角度。一个维度也用于测试汽车或高速导轨的噪声扫描测试。使用目标运动的特征,通过算法一维安排,可以实现汽车每个部分或高速导轨操作的噪声分布测量。一个维安排的应用方案相对较小,生产力的程度不高。通常,需要定制服务。
两个维麦克风阵列,即所有扬声器都排列在同一平面上,该平面可用于测量平面上通过波束形成算法的声压分布。成像图”。
声音云图
目前,两个维数阵列在麦克风阵列中使用,尤其是基于MEMS的便携式麦克风阵列。实时很强。同时,它配备了相机。声音摄像机”或“声音相机”有时称为“配乐”,这是相同的含义,即这样的麦克风阵列可以可视化声音。
它高度发达的便携式两个维度麦克风阵列
三维麦克风阵列在球形声音阵列中更为常见。它的算法是,光束在球坐标上形成光束的变化。基本原理是相同的。球形麦克风阵列的优点是,各个方向的声源可以同时位于。球形阵列通常配备了多个摄像头,同时在多个方向上拍照。因此,使用球形麦克风阵列在一些较小的封闭空间中,您可以使用中心的声音图(例如在阵列的中心)获取整个空间的整个空间。可以使用飞机舱的异常噪声定位和噪声源定位。麦克风阵列的空间分辨率与阵列的大小直接相关,而球形阵列通常不可能做到很大。因此,球形阵列还具有其弱点,即,空间分辨率和动态范围指标通常不高。在实际使用中,平面阵列的麦克风阵列更实用。将声源定位在封闭空间中还可以通过多个测试或多个阵列来工作,以获得比球形阵列更好的声源定位应用程序的效果。本质
麦克风阵列的关键指标是:空间分辨率(或空间分辨率),动态范围和工作频率范围。空间分辨率是指在同一时间区分多个声源的定位的能力,并使用两个已解析的DOT声源的最小距离来表征。
两个声源的分离足够大,可以区分声音云图。两个声源之间的距离很近,声音源云映射无法区分
动态范围是指可以成像的麦克风阵列的两个声源之间的声压水平之间的差异。动态范围可以用侧花瓣级MSL的最大侧表示(最大侧杆级)。当有多个声源时,如果麦克风阵列的动态范围太小,则只能将其放置在具有较大声音的大声源中。麦克风阵列的分辨率和动态范围是频率的函数。一般而言,频率越低,分辨率越差。动态范围与编队有关。操作频率范围是指麦克风阵列的分辨率到需要要求的声音间隔。
3)根据麦克风的形状,可以将平面声阵列分为均匀的阵列,圆形阵列,螺旋阵列和随机阵列。
麦克风在平面麦克风阵列中的布置对其性能指标有影响。对于具有物理大小和麦克风的麦克风阵列,从理论性能指标的角度来看,随机阵列的性能指标应愿意。但是,由于麦克风的数量有限,因此麦克风的位置不能是真正的随机。因此,其性能指标不一定是最佳的,需要通过仿真来优化。在麦克风阵列的实际设计中,螺旋阵列更常用。它在各个方面的指标都更好。也可以实现它。外观具有技术感。螺旋阵列的主要优点是频率分辨率很接近,幽灵阴影很小。统一阵列的构造很简单。它可以使用简单的工具(例如铝制概况)来构建,该工具适用于在大学和大学的教学和研究中使用。统一阵列的典型问题是还有更多的鬼魂。当旋转部分的位置时,圆形阵列是有利的,例如螺旋桨芯片旋转中的噪声分布。
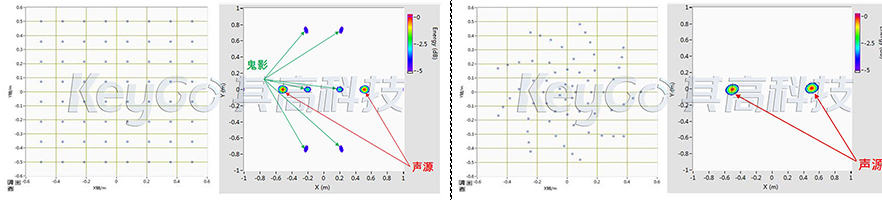
统一阵列及其成像模拟,螺旋阵列及其成像模拟
4)根据麦克风阵列的麦克风的数量和大小,可以将其分为微阵列,便携式小阵列,中等阵列,大阵列和分布式阵列。
微阵列包含2-8个麦克风,这些麦克风通常用于消费电子产品,例如笔记本电脑,手机和片剂中的平板电脑。它还使用一个微麦克风阵列,该阵列通常由4-6个麦克风组成。小阵列通常使用数十个MEMS麦克风。它主要用于便携式声学摄像机。在各个方面(例如易用性,可移植性,真实时间和性能)都很容易平衡。有许多领域的产品。

智能扬声器(来自互联网的图片)和便携式小组
中和大阵列通常由电容扬声器和同步数据采集系统构建。在消声室中,测试了声源。通常,采样介质大小的阵列。阵列的大小通常大于便携式声学相机,因此低频性能会更好。大型阵列使用数十万扬声器。主要应用是常见测试的目标和长距离。例如,飞机脱下噪音,风力发电机的工作噪音。
噪声源定位测试用于声音室以进行噪声源定位和大型阵列以进行风能监视
分布式阵列由多个小型麦克风共同工作,该麦克风可以获得比单个阵列更优化的性能指标。例如,在森林中排列了大量的小麦克风阵列,它们可以识别,定位和跟踪动物声音的声音,并与相机连接。当发现目标动物声音时,可以控制相机为其拍照。在重要的建筑物和场地周围,可以安排分布式麦克风阵列,这可以检测到无人机的侵入无人机的入侵和无人机的声学定位跟踪。
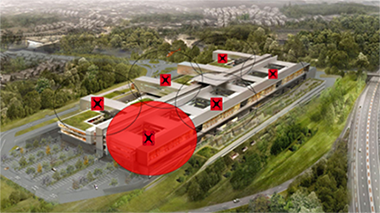
分布式麦克风阵列(图片来自互联网)
它的修辞相机产品
它的高科技在声学技术的研发和应用方面积累了十多年的经验。它具有完整的独立研发能力。从硬件开发,软件开发到算法开发,它已经完全完成。它的高科技研发团队在“声音和振动杂志”国际学术期刊上发表了十多个声音源定位的专利,并发表了声音成像和与源定位相关的算法。
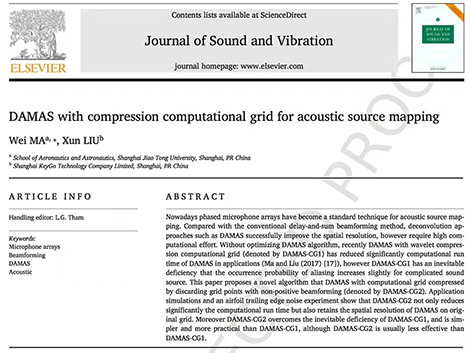
它的高-R&D团队在“声音与振动杂志”上发表了相关算法论文
其高自主研发的多款麦克风阵列,涉及众多成功应用场景,如汽车噪声异响定位、无人机声音定位、风力发电机组噪声测试、飞机飞行噪声定位、机器人声音定位、会议室说话人定位、,如汽车噪声异响定位、无人机声音定位、风力发电机组噪声测试、飞机飞行噪声定位、机器人声音定位、会议室说话人定位、电源噪声检测,捕获机动车哨声,声音增强等。
它的高科技麦克风阵列产品包括便携式声学摄像机,中型阵列,大阵列和分布式阵列。在汽车,泥泞室,航空航天,军事行业和智能运输中,有大量客户和应用程序案件。
它无情的源定位产品和解决方案
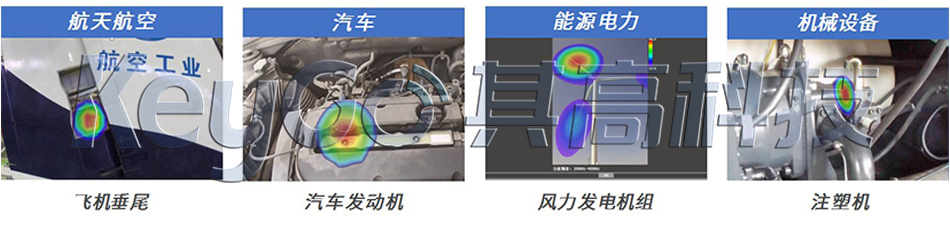
它的高麦克风阵列用于飞机垂直尾巴,汽车发动机,风力发电单元和注塑机器的噪声测试
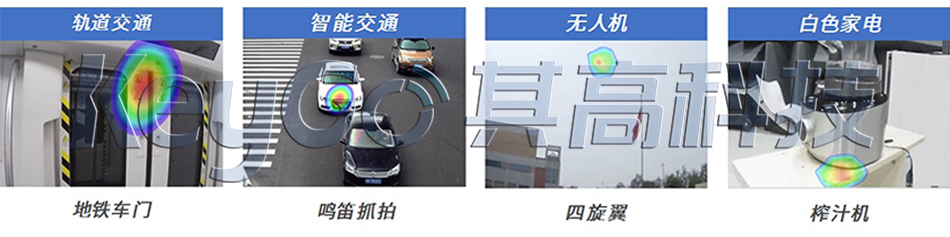
它的高麦克风阵列用于地铁门的噪声源定位,哨子捕获,四倍和榨汁机
基于声源定位技术的高级产品和解决方案

其玫瑰源定位申请案例