香港城大申亚京教授课题组与港大潘佳教授课题组合作《Sci. Robot.》:利用磁性薄膜制备自解耦和超分辨率的机器人触觉皮肤
触觉传感器可以通过接触使机器人具有感知和与外部环境相互作用的能力,并在机器人敏捷操作,人类计算机整合,模式识别等领域具有重要的应用。人的皮肤不仅可以感知感知的幅度和方向(自我抑制)(自我抑制)(自我抑制),而且外部刺激的定位准确性超过了平均空间(超级分辨率)(超级分辨率)(超级分辨率)(超级分辨率)。因此,人的手可以完成非常复杂且复杂的任务开元棋官方正版下载,例如抓取脆弱的物品,执行灵巧的操作,识别纹理,阅读盲文等。与人类皮肤相比,现有的机器人触觉传感器仍然存在很大的差距。例如,为了实现力解耦,通常需要设计复杂的传感器结构(例如刚性梁)或拟合复杂的数学模型。当实现解耦时,不可能同时进行超分辨率检测。等等,这极大地限制了机器人执行复杂任务的能力。
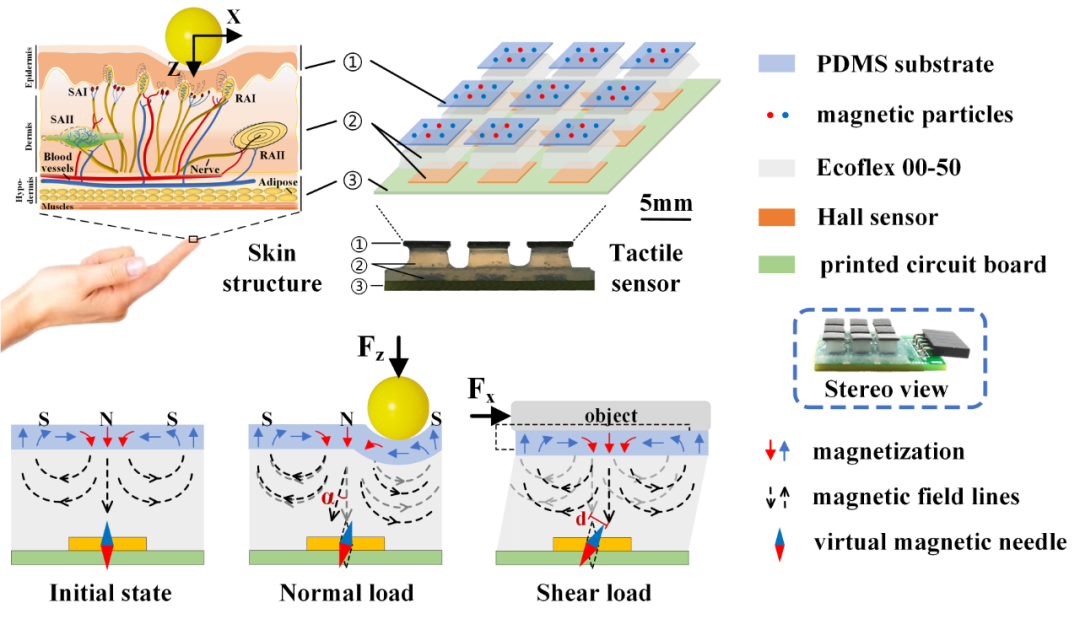
图1。磁性皮肤的结构和工作原理
香港城市大学生物医学工程系的Shen Yajing教授和香港大学计算机科学系的Pan Jia教授共同提出了基于磁性膜的触觉传感器。结合深度学习算法,它实现了机器人触觉传感器的自我结合和超分辨率,为模仿人类皮肤的触觉感知提供了新的想法。相关结果的标题为“用力自我耦合的超分辨率触觉感测的软磁皮”,最近发表在“ Sciencerobotics”中。
如图1所示,触觉传感器的核心由单面多阶段正弦磁化磁性膜的一层和嵌入在印刷电路板上的霍尔传感器组成。可以在磁性膜和霍尔传感器之间填充不同厚度和弹性的硅酮,以调节传感器的灵敏度和范围。当将外力施加到磁性膜上时,霍尔传感器将测量磁性膜变形引起的磁场的变化,进而可以测量所施加的外力的大小和方向。
“这种单一的多杆正弦磁化方法在学术上称为Halbach阵列(Halbach阵列)。其重要特征之一是,它可以极大地增强另一侧的磁场,而一侧弱化了磁场。该技术不仅在诸如粒子颗粒的磁场,磁性驱动器等方面都具有重要的应用。我们日常生活中使用的补丁。” Shen Yajing提到:“我们的研究团队和Pan Jia的研究团队正在尝试开发具有人类皮肤功能的触觉传感器。因为我们的研究团队主要从事微型机器人研究,所以它在早期工作中积累了一些磁性膜中的积累(自然通讯(Nature Communications)(9(3944),9(3944),2018年,2018年;高级科学; 7(13),2020年,2020年;科学界,48(48),那么48(48(48)在研究期间选择。方向和磁场方向RB仅与X方向相关(如图2所示)。这样,正常力Fz的输出仅与z方向相关,而切向力FX的输出仅与X方向相关(方程1),这为研究自我结合功能的触觉传感器提供了可能性。”
(一级方程式)
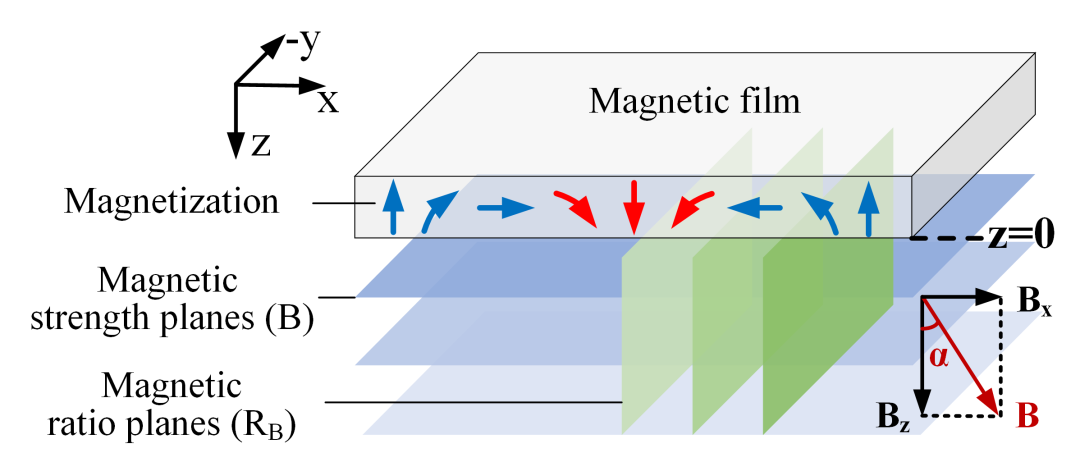
图2。磁感应强度平面和磁场方向平面的示意图
脱钩的磁皮可以提供正压和切向力(无串扰耦合)的独立测量,从而为机器人提供了更精确的力反馈。视频1显示了通过将磁性皮肤粘在机器人手上的适应性抓卵的应用。一开始,机器人不掌握,由负载引起的切向力Fz为零。当机器人夹住鸡蛋(T1)时,夹紧力FZ迅速增加,直到卵抬起(T2),由于卵的重力,切向力FX迅速增加。此时,应用了外部干扰:用手将鸡蛋向下拉(T3),切向力开始逐渐增加。为了不导致卵滑下,机器人会自动增加夹紧力,因此FX/FZ的比率总是小于滑动边界(联合力保留在摩擦锥中)。去除外部干扰后(T4),机器人开始自动释放夹紧下巴以防止鸡蛋被压碎kaiyun官方网站登录入口,从而在出现外部干扰时可以自适应地抓取(脆弱)对象。作为比较实验,当磁性皮肤没有提供力反馈时,由于夹紧力不足以克服外部干扰(T8),因此将鸡蛋取下。
动画1。基于力反馈的自适应鸡蛋保持
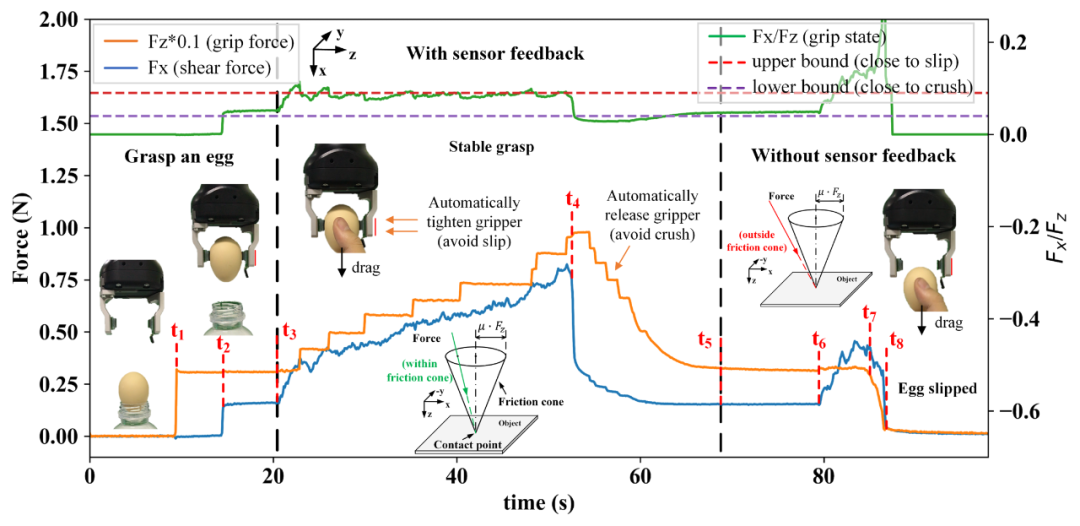
图3。基于力量反馈的自适应鸡蛋
视频1。根据力量反馈的自适应鸡蛋的演示
同样,视频2显示了如何使用磁性皮肤的力反馈自适应地调节机器人的夹紧力,从而稳定地夹住正在注射的水瓶。当液体不断注入水瓶中时,切向力FX逐渐增加,并且水瓶倾向于从机器人滑落(FX/FZ的比率接近滑动边界)。目前,机器人会自动增加夹紧力FZ,从而避免了水瓶滑下,并且任务成功。作为比较实验,如果没有磁性皮肤提供的力反馈,则水瓶在注入水时从手中滑出,任务失败。
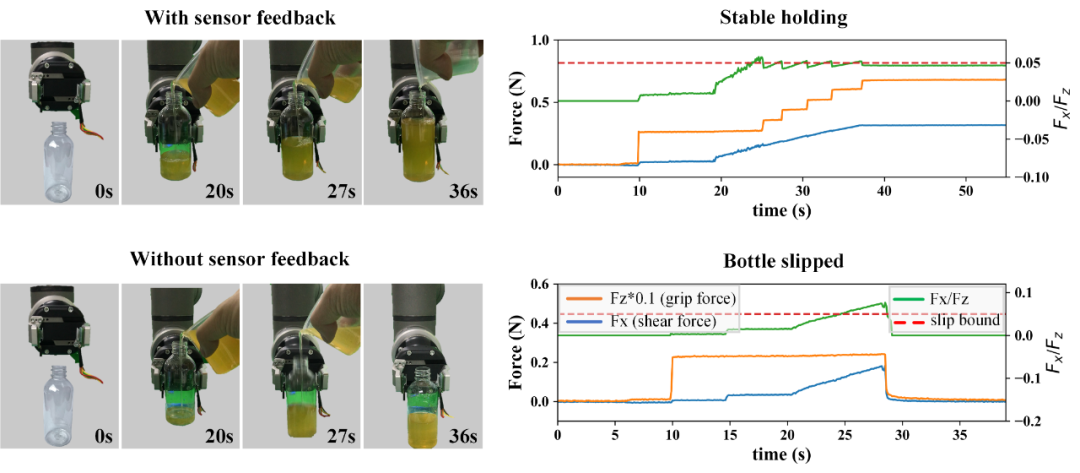
图4。根据力反馈抓住自适应水瓶
视频2。根据力反馈的自适应抓取和注入水瓶的演示
除了能够准确地解除外部力的大小和方向外,磁性皮肤还具有触觉超级分辨率,也就是说,外部刺激的定位精度还可以超过传感器的物理分辨率(两个传感单元之间的距离)。如图5所示,一个小球在磁性皮肤的传感单元上按下(整列3x3传感单元)。通过定性地分析霍尔传感器X,Y和Z方向的磁通密度变化,可以确定小球与皮肤的接触位置位于S5的右上角。此外,通过定量计算神经网络,可以将小球的接触位置准确地定位在S5右上角的(x,y),并且定位精度(0.1 mm)可以达到磁性皮肤物理分辨率的60倍(邻近传感单位6mm)的物理分辨率。
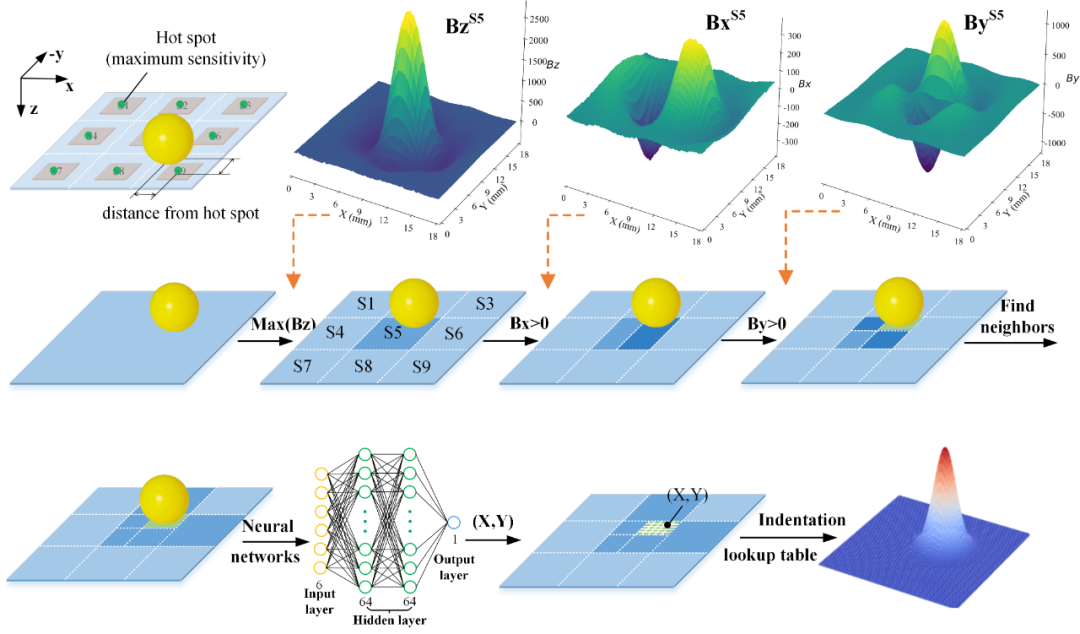
图5。磁性皮肤的触觉超分辨率原理的示意图
研究团队使用两种不同的方案来证明机器人技术领域触觉超分辨率的应用前景:在第一个显示(视频3)中,研究人员使用超分辨率来跟踪球的接触位置和接触力实时在磁性皮肤上滚动的接触力;在第二个显示(图6和视频4)中,研究人员仅使用一个传感单元来控制机器人臂的六个运动方向(上,下,前,前,背,左,右)。在研究人员的遥控器下,机器人臂可以完成针线螺纹的精细操作。
“深度学习已经越来越广泛地用于机器人领域。例如,在我们的早期工作中,我们使用深度学习来实现碰撞检测和预防多个机器人(国际机器人研究杂志,39(7),2020年)。智能算法为特定的硬件进行了协作而设计的智能算法可以进一步突破硬件本身并获得更好的效果。” Pan Jia said, "We designed deep learning methods for the characteristics of magnetic films, increasing their super resolution to 60 times, reaching a level comparable to the super resolution of human skin (about 40 times). In this way, while implementing functions, we can greatly reduce the sensing units and wiring in robot skin, thereby improving the ease of use of smart skin. This is crucial for covering the whole body of robots in the future, so that robots have the same全身触觉感知能力作为人类。”
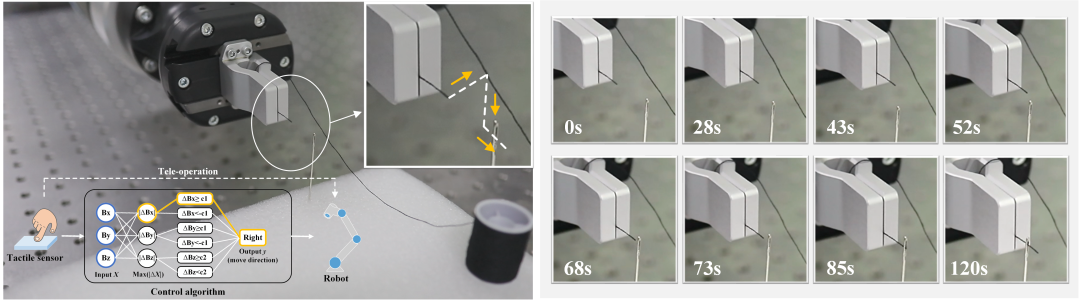
图6。基于触觉超级分辨率的遥控针线
视频3。使用触觉超分辨率实时跟踪滚动球的演示
视频4。使用触觉超分辨率遥控机器人臂进行针线螺纹的演示
研究人员终于预测:“具有自我耦合功能的超级分辨触觉感知在机器人领域具有巨大的应用潜力。它可以使机器人能够使用敏捷性操作日常对象并改善人类计算机互动的安全性。在不久的将来,在不久的将来,涵盖人造皮肤的家庭机器人会成为我们日常工作的不足之处。针对不同方案的特定超分辨率算法,以实现硬件和软件的深层融合,以使磁性皮肤的应用方案更加广泛。”
Shen Yajing和Pan Jia是作品的共同作者,Yan Youcan是该论文的第一作者,合作团队的其他成员来自香港城市大学,卡内基·梅隆大学和南方科学技术大学。
The research of this project has been jointly funded by NSFC Excellent Youth Project (Hong Kong and Macao Regions) 61922093, NSFC-Shenzhen Joint Key Project U1813211, Hong Kong UGC projects 11211720, 11207818 and 11202119, NSFC/RGC joint research project N_HKU103/16, and Shenzhen Discipline Layout Project JCYJ20200109114827177。
文章链接:Y. Yan,Z。Hu,Z。Yang,W。Yuan,C。Song,J。Pan*,Y。Shen*,用力自我耦合的超分辨率触觉感测的软磁性皮肤。科学。机器人。 6,EABC8801(2021)。 doi:10.1126/scirobotics.ABC8801
相关进度
有关聚合物技术的原始文章。欢迎个人转发和共享。如果您需要在出版物或媒体上重印出版物,请联系电子邮件地址:info@polymer.cn
邀请贡献
欢迎专家和学者向info@polymer.cn提供手稿(论文,项目介绍,新技术,学术交流kaiyun全站登录网页入口,会议信息,招聘和招聘等),并请注明详细的联系信息。 PolymerTechnology®将同时在中国聚合物网络上迅速推出和发布。
欢迎加入微信集团。为了满足聚合物行业,学术界和研究中各行各业的同事的要求,已连续开设了数十个特殊交流小组,包括聚合物专家和学者,包括聚合物行业技术,企业家,博士,博士生,媒体学生,媒体期刊展览会等,涵盖了聚合物行业或领域。目前,它汇集了来自科学研究机构和国内外的科学研究机构和企业R&D中心的成千上万高级专家,学者,技术人员和企业家。
要申请加入小组,请首先添加微信帐户Polymerchina(或长以下QR码),请指出:Polymer + Name + Nime +单位 +专业标题(或Demal) + Field(或行业),否则将不接受。审查资格后,您将被接纳为相关的专业小组。

观点